
A Rényi Intézetben zajló űrkutatások számos földi robotikai eszköz fejlesztéséhez járulnak hozzá.
A Kapu Tibor magyar űrhajós által elvégzett és a Rényiben megtervezett kísérlet komoly előrelépést hozott mind a tehetetlenségi navigáció vizsgálatát, mind pedig az én kutatói-szakmai pályaívemet tekintve – összegezte a Nemzetközi Űrállomáson végrehajtott vizsgálatsorozat nyomán Kornyik Miklós, a Rényi Intézet tudományos munkatársa, a vizsgálatokat előkészítő alkalmazott matematikus, aki inerciális (tehetetlenségi) mérőeszközök (ún. IMU szenzorok) alkalmazásával és GPS nélküli, ún. vak tájékozódással foglalkozik. Miután az ehhez szükséges mérőeszközöket földi körülmények között gyártják és tesztelik, és a Földön használt gyorsulásmérők elkerülhetetlenül „hozzá”mérik a gravitációs gyorsulást is, nagy jelentősége van a Föld gravitációs gyorsulása kiszűrésének, valamint az adatokat szolgáltató szenzorok vizsgálatának súlytalanságban. A kutató úgy fogalmaz, hogy az űrkísérlet és a HUNOR katalizálta a lehetőségeit és a motivációját.
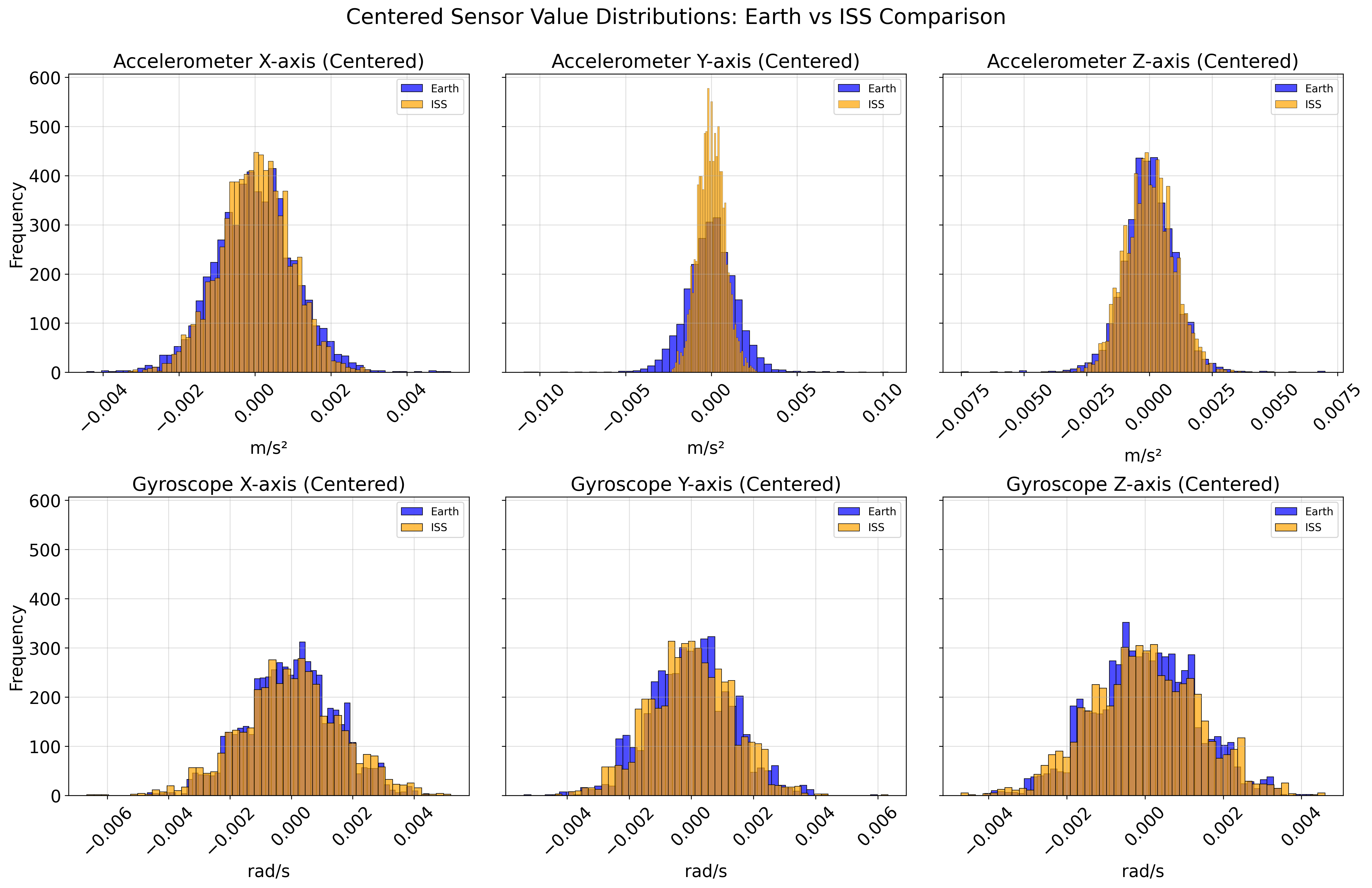
A HUN-REN Rényi Alfréd Matematikai Kutatóintézet IMU-DRS projektjének célja a navigáció vizsgálata súlytalanságban, kizárólag gyorsulásmérő és giroszkóp szenzorok által szolgáltatott adatok alapján. Kapu Tibor egy mobileszközt és a Rényiben, Kornyik Miklós vezetésével egy speciálisan erre a célra fejlesztett alkalmazást vitt a Nemzetközi Űrállomásra. Először nyugalomban lévő telefonnal hajtott végre kalibrációs méréseket, amelyek 30 másodpercnyi adatból, másodpercenként 100 mérési pontból álltak. Ez arról adott információt, hogy a mérési hibák, azaz az úgynevezett szenzorzaj hogyan viselkedik súlytalanságban, a nyomkövetés és az ún. vak tájékozódás minőségét ugyanis jelentősen ronthatja a nem megfelelő szűrés és hibakezelés. A 2. szakaszban Kapu Tibor mozdulatsorokat végzett, amelyeket a telefon szenzorai rögzítettek, majd további három órányi kalibrációs mérési adatot is gyűjtöttek. Ezek kiértékelése és a legfontosabb következtetések levonása volt a még ma is zajló tudományos feladat a Rényiben, Kornyik Miklós számára Kapu Tibor visszaérkezése után.
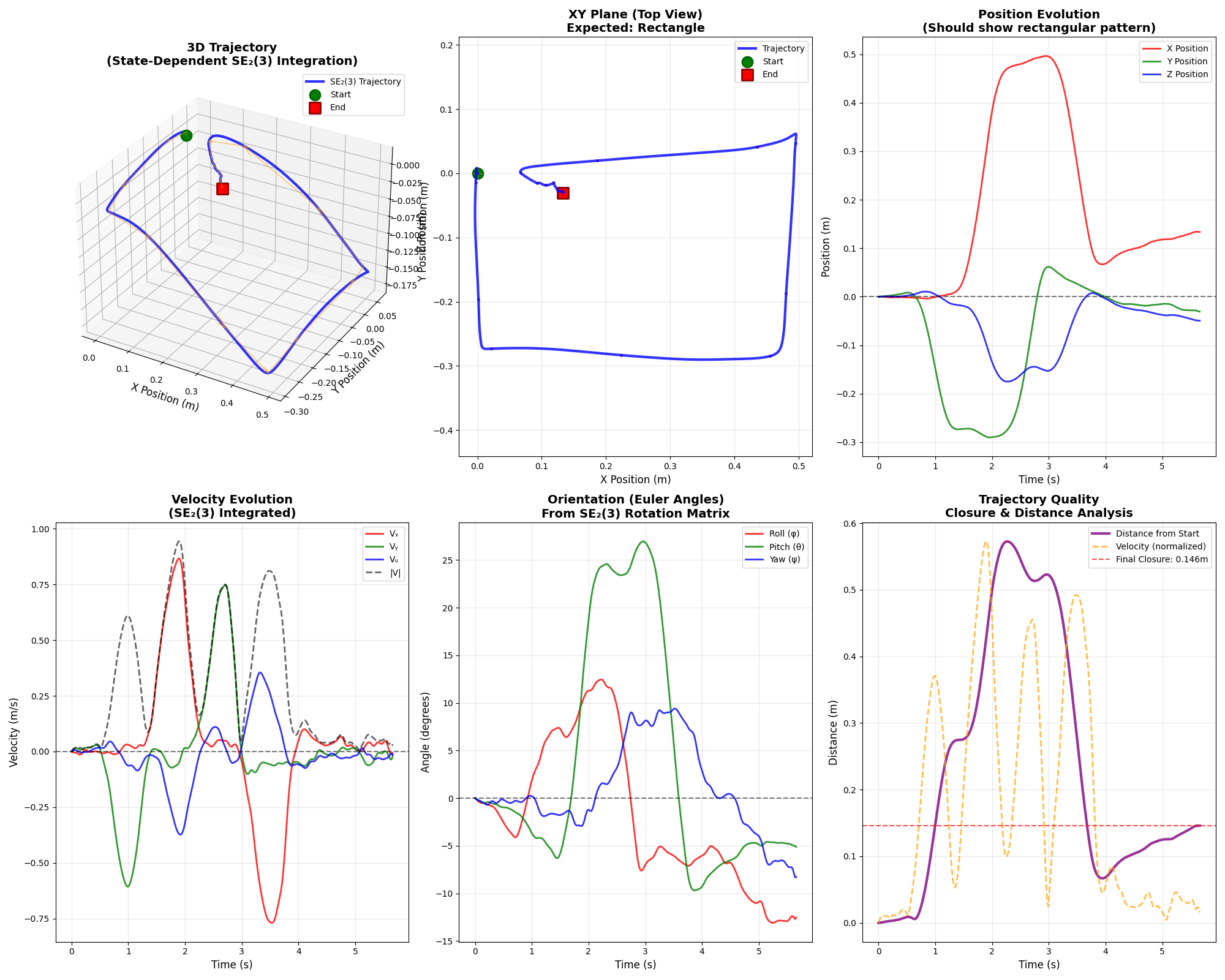
A vak tájékozódás, azaz "dead reckoning" egy olyan navigációs eljárás, amely nem külső tájékozódási pontokból, pl. GPS-ből indul ki. Ilyenkor egy ismert kiindulópontból irány, sebesség és eltelt idő alapján számolható ki, hogy a szenzorokkal „felszerelt" tárgy éppen hol található.
Az IMU (Inertial Measurement Unit) általában gyorsulásmérőből, giroszkópból (billenés, elfordulásmérő) áll, így gyorsulást, forgást, irányváltoztatást mér és ezekből számolható, hogyan mozog egy test a térben. Az IMU adatot szolgáltat, a vak tájékozódás pedig a módszer, ami ezt felhasználja. Az IMU tehát képes megmondani, mit csinál a test, a dead reckoning pedig azt, hogy hol van a test.
Kapu Tibor visszatérését követően, mára megtörtént a készülékkel általa leírt pályák rekonstrukciója. Most a külső kamerával készített videó elemzése és a leírt pályák, ún. trajektoriák összehasonlítása, kiértékelése zajlik – magyarázza Kornyik Miklós a renyi.hu kérdésére –, ami azt jelenti, hogy a telefon által rögzített adatokból kiszámolt pályákat összevetik a falra szerelt kamera által rögzített videofelvételben látható pályákkal. „Tehát, ha a telefonnal egy háromszöget írt le Kapu Tibor, vagy bármely más egyszerű geometriai sémákat, akkor ezt egyszerre két módon is tudjuk ellenőrizni. Az előzetes vizsgálatok alapján látszik, hogy súlytalansági körülmények között kisebbek a szenzoros mérési hibák, bár a különbség nem jelentős” – teszi hozzá. (A külső kamera egyébként a NASA tulajdona, és Kornyik Miklósnak a NASA adta át a felvételeket.) „Így ellenőrzöm – fűzi hozzá –, hogy jól sikerült-e leírni a (röp)pályát, hiszen mind a kamera, mind a telefon műszaki paramétereit ismerem. Az első számítások alapján elmondható, hogy a kísérlet minden része jól sikerült.”
„A dead reckoning már régóta létező probléma, és még nem oldottuk meg, csak mindig egy kicsivel jobban tudjuk csinálni – folytatja Kornyik Miklós. A Földön is és az ISS-en is van gravitáció, csak az ISS-en nem érezzük, mert az folyamatosan zuhan. A Földön nem fordul elő, hogy valami folyamatosan, órákon, vagy akár napokon át esik. Az volt a kérdés, hogy ha nincs ez a folyamatos, gravitációnak köszönhető látens gyorsulás, amit érzékel a szenzor, akkor a zaj karakterisztikája ugyanaz lesz-e.
Alapvetően jól működő műszerek esetén közel ugyanazt a zajt várjuk az ISS-en, mint a Földön, ám ennek konkrét kísérleti igazolása is fontos. Ez így is lett, egy kicsi eltérés van csupán. A zajkarakterisztika megértése azért fontos, mert így a méréseket jobban lehet szűrni, és így valósághoz közelebbi mérési értéket tudunk kapni.
Voltak egyéb tudományos megfigyelések is, például a különböző tengelyek menti mérések közötti összefüggések, ezek vizsgálata is még most van folyamatban. Az említett vizsgálatokból és eredményekből tudományos publikáció készül, ami tudományos mérföldkő lesz.
„A kutatói pályám fejlődését a miniatűr drónok megalkotása irányában tervezem” – teszi hozzá a rényis kutató. „Ezek karbantartó kis robotok, műholdak és űrállomások körül tudnak segédkezni. Fejlesztésük egy 5-10 éves projekt, amihez hozzátartozik a matematikai és technikai feltételek megteremtése és egy egyszerű prototípus fejlesztése is, utóbbi külső szakértők bevonásával történhet.”
Kornyik Miklós végső célja tehát ún. maintainance drónok kifejlesztése. A következő lépés az ehhez vezető úton egy olyan drón létrehozása, amely az ISS-en belül tudna működni. „Hasonlók vannak már fent, de ezen eszközök használata eléggé korlátozott, attól is függ, kinek a tulajdonában vannak, melyik országéi: többek között van a japán űrügynökség (JAXA) drónja, az ún. Int-Ball, az ESA (Európai Űrügynökség) korábbi években a Cimon drónokat tesztelte. Ezek különféle feladatok ellátására képesek, mint amilyen a kamerázás, segédszövegek felolvasása, esetleg lehet velük beszélgetni is, valamint képesek az önálló helyváltoztatásra.
A Kapu Tiborral történt részletes konzultáció alapján elmondható, hogy más feladatok miatt is volna igény minidrónokra az ISS-en. Terveim között szerepel egy aktív, munkaállomás-szerű segéd prototipizálása, amely az űrállomáson belüli munkát tudná támogatni több szempontból is. Nem titok, hogy nagyon könnyű elhagyni szerszámokat az ISS-en, ugyanis a légellátó rendszer miatt van egy légáramlás, és egyszerűen ellebegnek. Egy ilyen segéd tudja követni az űrhajóst, amihez az űrhajós szerszámokat is tudna rögzíteni. A távolabbi jövőben pedig megkérhető lenne arra is, hogy hozzon pl. egy csavarkulcsot. Ez a rész talán még sci-fi-ként hangzik, de ami egyáltalán nem az: egy olyan drón, ami a kamerázás mellett egyszerűbb segítséget is tud nyújtani. Nagyon sok olyan kísérletet végeztek Tiborék is, amelyek külső kamerafelvételeit is kérték tőlük. Ezt mind össze kellett rakni, úgy, hogy az ún. field of view (képi felvételi szög) megfelelő legyen, ehhez gyakran meg kellett kérni egy űrhajóstársat, hogy segítsen. A terveimben szereplő eszköz egy multifunkciós work station, ami nagyon meg tudná könnyíteni a kísérleteknél kötelező kiegészítő munkát” – mondja Miklós, aki végső soron egy, az ISS-en kívül közlekedni képes drón fejlesztését célozta meg. „ A tervek szerint az ISS 2030-31-ig fog még szolgálni, de ez az okoseszköz műholdak vagy a föld körül repülő más automatizált platformok körül is tudna segédkezni”– avat be a hosszú távú terv részleteibe.
„Tiborral tartjuk a kapcsolatot azóta is, tetszett neki az app, kreatívnak és intuitívnak érzékelte, az űrdrónnal kapcsolatban is tartottunk brainstormingot, hogy jobban lássuk, mire lehet szükség és milyen reális fejlesztési utak vannak” – számol be Miklós az elmúlt időszak friss élményeiről.
Az eredmények hasznosak lehetnek az űrbeli navigációban, űreszközök együttes koordinálásában, dokkoláskor, karbantartási munkálatok elvégzésekor. Vannak földi alkalmazásai, azaz, hasznosulásai is Kornyik Miklós kutatói munkájának, és annak, hogy ez a kísérlet Kapu Tibor közreműködésével lezajlott az ISS-en. „A GPS nélküli nyomkövetés a robotikában van jelen a legnagyobb súllyal. Nemcsak hétköznapi értelemben, mondjuk két földrajzi hely közötti navigációról van szó, amikor kevésbé számít, hogy néhány métert téved a rendszer, hanem arról, hogy ha egy robot történetesen barlangban vagy egy épületen belül közlekedik, ott nem engedhető meg néhány méteres pontatlanság. Akkor sem, ha történetesen volna ott GPS.
A pályarekonstrukció elengedhetetlen eleme az autonóm, azaz önjáró, feladatmegoldó eszközök manőverezésének, az útjuk tervezésének, vagy akár az út korrigálásának, ha éppen váratlan dolog történik. Manapság egyre gyakrabban előforduló „robot nővérek” esetében is rendkívül fontos, hogy mindig jól strukturált és jól vezérelt mozdulataik legyenek. így a beteg lábához pontosan érkezve azt megfelelő szögben tudják emelni, ne rántsák fel stb., ezek kivitelezésének pedig szerves része a pályarekonstrukció.
„Amit az IMU-DRS kísérlet célul tűzött ki, az a nyomkövetés vizsgálata, ami az adott robotot ért hatások adatelemzéséhez köthető (nekimegy valamilyen tereptárgynak, felborul stb. – ez mind látszik az adatokon). Ahhoz, hogy biztonságosan tudjunk feladatot végrehajtatni robotokkal, elengedhetetlen a pályaelemzés. Kizárólag IMU-s, azaz tehetetlenségi adatok alapján hosszú távon szinte lehetetlen tájékozódni, de nem is ez a cél. Általában a robotok nagy részén sok más szenzor is megtalálható – többek között kamera, ultrahangos távolságmérő stb. –, amelyek együttesen segítik a robot tájékozódását. Ezek közül az egyik a manőverezésüket támogató tehetetlenségi navigáció. A kutatásaim az egyre több automatizált eszközt használó mindennapokban a technikai fejlődés egy újabb lépéséhez járulnak hozzá.
